Unitree Robotics
The Company That Made Humanoid Hardware Cheap - and the Harder Race to Make It Useful
How to Read This Report
This report is designed as both a long-form feature and a navigable company intelligence page. The narrative sections explain why Unitree matters; the product, technology, research, media and source sections let readers inspect the underlying evidence. The report does not treat a choreographed performance as proof of autonomous work, a shipment as proof of productive deployment, or a partnership announcement as proof of a paid customer relationship.
Evidence labels used in this report:
| Label | Meaning |
|---|---|
| Verified / strongly supported | Supported by regulatory filing, official product documentation, named customer confirmation, peer-reviewed or primary research, or multiple independent sources. |
| Company claim | Stated by Unitree but not independently verified at the same level. |
| Editorial inference | A reasoned conclusion from public evidence; not a direct company statement. |
| Unknown | Important data is not publicly disclosed or is too ambiguous to present confidently. |
1. Executive Overview
On the most watched television night in China, Unitree humanoids spun, kicked and vaulted in coordinated formation. The performance was a cultural spectacle, but also a compressed demonstration of what the Hangzhou company does best: high-torque electric joints, dynamic balance, fast motion control, and the ability to build enough similar robots that a fleet can rehearse the same demanding routine. The images traveled globally because they seemed to announce that the humanoid age had arrived. [18] [19]
The more important story is less theatrical. Unitree has driven the price of humanoid hardware down from the realm of national laboratories and heavily financed startups toward something universities, smaller companies and advanced developers can actually buy. Its G1, R1, H1 and H2 families span compact education platforms through full-size humanoids. The company says it shipped 5,500 humanoids in 2025, and its IPO-related disclosures show humanoids becoming its largest business line. Those are substantial achievements in an industry where many competitors still operate small pilot fleets. [3] [5] [6] [11] [12]
Yet Unitree has not solved the problem that matters most: reliable autonomous work. Its robots are unusually good bodies. They are not yet general workers. Research and education remain the bulk of sales, while dexterity, perception, task planning, safety, recovery and uptime outside controlled environments remain immature. The company’s own IPO materials acknowledge limited commercial applications, and independent reporting continues to find a gap between visible movement and economically useful labor. [12] [14]
This tension defines Unitree. It may become the hardware platform on which a global ecosystem builds embodied intelligence - something like an Android layer for humanoid research. Or it may remain a successful seller of impressive development machines whose commercial value is concentrated in research, education, entertainment and narrowly structured industrial trials. The outcome will be decided less by the next backflip than by intervention rates, task success, maintenance, safety and customer return on investment.
Company Snapshot
| Field | Current public-source assessment |
|---|---|
| Legal / brand identity | Hangzhou Yushu Technology Co., Ltd.; Unitree Robotics / 宇树科技 |
| Founded | 2016, following founder Wang Xingxing’s XDog work |
| Headquarters | Hangzhou, Zhejiang, China |
| Founder / CEO | Wang Xingxing |
| Core businesses | Humanoid and quadruped robots, robotic arms, actuators, LiDAR, developer platforms |
| Commercial status | Robots sold directly and through channels; IPO filing on Shanghai STAR Market |
| Reported 2025 humanoid shipments | More than 5,500 units |
| Best-established strengths | Actuators, dynamic locomotion, vertical integration, cost, manufacturing scale |
| Largest unresolved weakness | Reliable autonomous manipulation and general task productivity |
| Most credible current markets | Research, education, demonstrations, corporate R&D and selected industrial trials |
Max Robotics Assessment
| Dimension | Assessment | Why |
|---|---|---|
| Hardware maturity | High relative to humanoid sector | Commercially obtainable platforms, product generations and thousands of reported shipments. |
| Dynamic mobility | Very high | Repeated public and third-party evidence of fast, robust whole-body motion. |
| Manipulation | Developing | Hands, loco-manipulation research and developer configurations exist, but general reliability is unproven. |
| General autonomy | Early | Much advanced behavior remains task-specific, teleoperated, preprogrammed or research-stage. |
| Manufacturing readiness | High relative to competitors | Vertical integration and disclosed production/shipment volume. |
| Industrial labor proof | Limited | Trials and structured tasks exist; sustained ROI, uptime and intervention data are scarce. |
| Household readiness | Low | Safety, manipulation, privacy, support and autonomous recovery are not consumer-appliance grade. |
| Research-platform value | Very high | Affordable hardware, SDKs, simulation, ROS integration and broad academic adoption. |
| Hype exposure | High | Spectacular performance can be mistaken for general intelligence. |
| Underlying substance | High | The company has real engineering, products, revenue and manufacturing scale. |
Latest news
- Nvidia deepens humanoid robotics role with Unitree and Cosmos 3, secures AI chipsDigitimes·2026-06-05GENERAL
- The 'Wintel' of robotics? Nvidia allies with Unitree to standardize AI humanoid developmentDigitimes·2026-06-04GENERAL
- Nvidia Partnered With A Chinese Company To Build A 'Physical AI' Humanoid RobotBGR·2026-06-03GENERAL
- Nvidia looks beyond China’s Unitree for its humanoid robot pushThe Next Web·2026-06-01GENERAL
- Unitree Announces H2 Plus, an NVIDIA Isaac GR00T Reference Humanoid Robot for Academic ResearchPRNewswire·2026-06-01GENERAL
- Nvidia to work with US, European humanoid robot makers in addition to China's UnitreeThe Times of India·2026-06-01GENERAL
2. The Unitree Story: From XDog to a Humanoid Platform Company
The founder built across the whole stack
Unitree’s story starts with a robot dog rather than a humanoid. During graduate study, Wang Xingxing developed XDog, a quadruped that required him to work across control simulation, permanent-magnet motors, PCB design, mechanical legs and software. That breadth became the company’s culture: hardware, electronics and control treated as one system rather than separate procurement decisions. [2]
When Unitree was founded in 2016, the practical opportunity was quadrupeds. Models including Laikago, AlienGo, A1, Go1, Go2, B1 and B2 gave the company years of experience with impact-resistant joints, state estimation, battery packaging, high-frequency control and manufacturing consistency. By the time Unitree entered humanoids, it already possessed supplier relationships and component families that many humanoid-only startups still needed to develop. [1] [2]
A hardware-first path into embodied AI
Many modern humanoid startups began with an AI thesis and then searched for a body. Unitree moved in the opposite direction. It learned to produce capable bodies first, then expanded toward embodied intelligence. That sequence explains both its advantage and its vulnerability. The company can place affordable machines into many hands, creating data and developer momentum. But the intelligence layer remains dependent on a broader ecosystem of academic groups, AI-model developers, teleoperation systems and simulation platforms.
The move from quadrupeds to the H1 full-size humanoid and then to the compact G1 was therefore less a sudden pivot than a transfer of accumulated capabilities. Motors, reducers, encoders, controllers, LiDAR, battery systems and reinforcement-learning environments could be reused. The harder additions were bipedal balance, upper-body manipulation, whole-body coordination and human-scale safety. [4] [8]
The performance strategy
Unitree has also understood that humanoid robotics is an attention economy. Public dances, martial-arts routines and athletic demonstrations turn engineering attributes into memorable images. The 2025 and 2026 Spring Festival appearances provided extraordinary distribution for the brand. They demonstrated repeatability, locomotion and fleet coordination, while encouraging a larger public inference: that a machine able to move like this must be close to useful work. [1] [18] [19]
That inference is precisely where careful reporting is required. A choreographed routine can be technically excellent without requiring scene understanding, tool selection, fault recovery or a positive labor-cost calculation. Unitree’s performances are evidence of mechanical and control progress. They are not evidence that the robots can autonomously complete arbitrary factory or household jobs.
Timeline
| Period | Milestone | Why it matters |
|---|---|---|
| 2013-2016 | Wang Xingxing develops XDog | Creates the integrated engineering foundation for Unitree. |
| 2016 | Unitree founded in Hangzhou | Commercial focus begins with electric quadrupeds. |
| 2017-2022 | Quadruped portfolio expands | Builds actuator, control, supply-chain and manufacturing experience. |
| 2023 | H1 introduced | Unitree enters full-size humanoids with mobility as the headline strength. |
| 2024 | G1 introduced | A smaller, lower-cost platform dramatically widens developer access. |
| 2025 | Humanoids become central revenue line | Public performances, shipment growth, R1 and newer configurations accelerate attention. |
| 2026 | H2 expansion and STAR Market IPO filing | Unitree seeks capital for R&D and manufacturing while facing stronger competition and margin pressure. |
3. Product Portfolio: What Unitree Actually Sells
Unitree’s humanoid portfolio is best understood as a ladder. Compact models lower the cost of participation; full-size models maximize motion, payload and AI-compute potential; education editions expose more interfaces and hardware options. The published entry price often excludes shipping, taxes, integration, upgraded compute, hands, extra batteries and technical support, so it should not be treated as total deployment cost. [3] [4] [5] [6]
Product comparison
| Model | Approx. size / mass | DOF | Published starting price | Primary role | Reality check |
|---|---|---|---|---|---|
| R1 / R1 Air | 1.23 m; 27-29 kg | 20-40 by configuration | $4,900 Air; $5,900 R1 | Entry-level development and education | A low-cost humanoid chassis, not an autonomous home worker. |
| G1 / G1 EDU | 1.32 m; about 35 kg | 23-43 by configuration | Historically about $13,500-$16,000 base | Research, education, embodied-AI experimentation | The most strategically important platform for ecosystem growth. |
| H1 / H1-2 | About 1.78-1.80 m; 47-70 kg | H1-2: 27 | $90,000-class configurations historically | Full-size mobility and advanced research | Strong locomotion; manipulation maturity varies by configuration. |
| H2 / H2 EDU | 1.82 m; about 70 kg | 31 | $29,900 base H2 | Full-size research and future industrial development | Higher compute and newer architecture, but real work evidence remains limited. |
G1: the ecosystem product
The G1 is Unitree’s most consequential product because it changes who can participate. At roughly 1.32 meters and about 35 kilograms, it is easier to transport and safer to operate in a laboratory than a 70-kilogram full-size machine. Its 23-to-43-joint configurations, LiDAR and depth sensing, hand options and developer interfaces make it a common base for teleoperation, reinforcement learning, loco-manipulation and VLA research. [3] [17] [20] [21] [22] [24] [26] [27] [28] [29] [30] [31] [32]
The G1’s limitation is equally important: a buyer receives a platform, not a solved application. Useful deployment may require substantial work in simulation, calibration, control, perception, safety and task-specific AI. A headline price can therefore conceal an engineering program.
R1: the price-floor product
The R1 pushes the starting price below $5,000 for the Air configuration and roughly $5,900 for the standard version. That is a symbolic break with the history of humanoids as six-figure or noncommercial systems. Yet lower cost also narrows hardware and compute. R1 is most plausibly a teaching, experimentation and developer platform, with useful value determined by what the customer builds on top of it. [5]
H1 and H1-2: mobility first
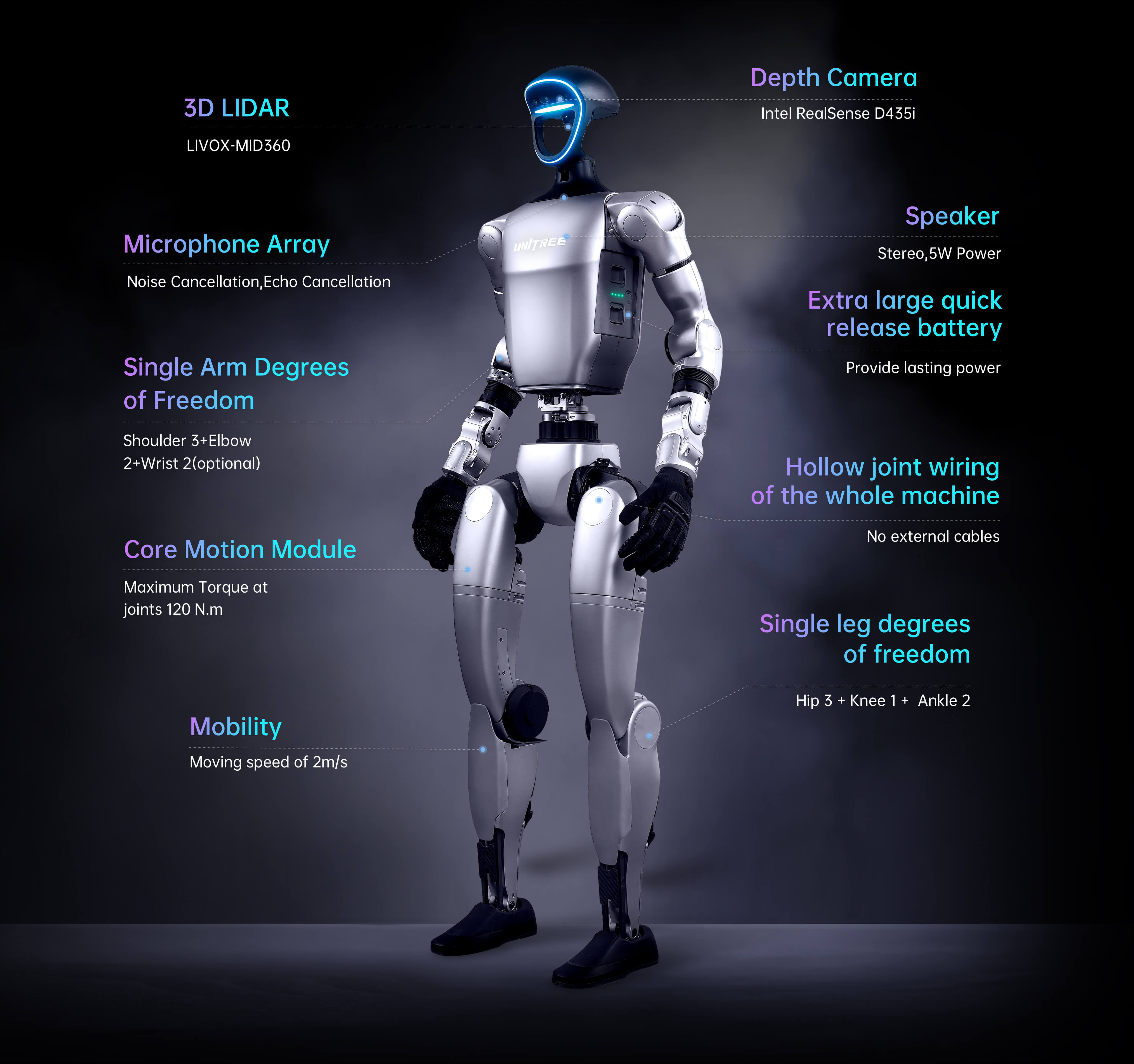
The H1 family established Unitree’s reputation for full-size dynamic locomotion. Unitree lists the H1-2 at approximately 178 centimeters, 70 kilograms, 27 degrees of freedom, arm-joint torque up to 120 N.m and leg-joint torque up to 360 N.m. LiDAR and depth cameras provide 360-degree sensing. Those specifications support forceful motion, but dexterity and endurance remain dependent on hands, software and use case. [4]
H2: toward a more complete compute platform
The H2 is listed at approximately 182 centimeters, 70 kilograms and 31 degrees of freedom, with a $29,900 base price and a stated compute configuration reaching 2,070 TOPS. The product signals Unitree’s intention to pair its mechanical platform with much stronger onboard AI. The unresolved question is how much of that compute translates into robust task autonomy rather than demonstrations and research experiments. [6]
Products & versions




4. Technology Stack: Where Unitree Is Strong - and Where the Work Remains
Vertical integration
Unitree says it develops key components including motors, reducers, controllers, LiDAR and motion/perception algorithms. This integration matters because a humanoid contains dozens of joints, and small cost or reliability improvements multiply across the machine. Reusing component families across quadrupeds, humanoids and arms can improve purchasing leverage, tuning and repair economics. [8]
Actuators and whole-body motion
The company’s public advantage is the relationship between torque density, control frequency and mechanical packaging. Fast recovery after a push, deep knee bends, running and aerial movements require joints that respond quickly while surviving repeated impacts. Unitree’s motion is not merely visual polish; it is evidence that the company has solved a difficult electromechanical integration problem.
But dynamic motion is not the same as productive manipulation. A factory robot may need slower, less dramatic motion with much higher positional repeatability, force control, gripper reliability and safety certification. The most important future hardware work is therefore likely to be in hands, tactile sensing, wrist force control, serviceability and endurance rather than ever more spectacular kicks.
Perception
Unitree platforms commonly combine LiDAR, depth cameras, inertial sensing, joint encoders and optional hand or wrist sensors. This is sufficient for localization, mapping, obstacle awareness and research manipulation. The challenge is not merely detecting objects; it is maintaining accurate world state during contact, occlusion, lighting variation and body motion.
Simulation and sim-to-real
Unitree maintains official MuJoCo, ROS 2, Python and reinforcement-learning repositories. Its MuJoCo environment is explicitly designed so control programs developed with SDK2, ROS 2 and Python interfaces can move between simulation and physical development. That is one of the strongest signals that Unitree understands its platform value lies in developer iteration, not only robot sales. [7] [8] [9] [10]
Public repositories also expose the friction of the current ecosystem. Developers encounter middleware, model, sensor, firmware and simulation issues. This is not unusual; it is a reminder that humanoid development still resembles advanced robotics engineering rather than consumer app development.
Teleoperation: capability, data engine and disclosure problem
Teleoperation is central to modern humanoids for three reasons. It enables impressive behavior before general autonomy is ready; it allows a human to rescue failed tasks; and it generates demonstrations for imitation learning. Research systems including TWIST, ExtremControl and IMU-based whole-body teleoperation show how sophisticated motion can be mapped onto G1 hardware in real time. [20] [21] [22]
Teleoperation is legitimate technology, but media and vendors must disclose it clearly. A teleoperated catch, tool use or cooperative lift demonstrates hardware bandwidth and control. It does not demonstrate that the robot perceived the task, selected the action and recovered autonomously.
Embodied AI and VLA systems
The research frontier is moving toward policies that combine language, vision and action with whole-body control. Work such as LEGS, MotionWAM, EgoHumanoid and hierarchical vision-language planning uses Unitree platforms to explore synthetic data, world-action models, human video, scene reconstruction and long-horizon task planning. These papers show the G1 becoming a common experimental body for the field. [26] [27] [28] [33]
This external research is an advantage for Unitree: every lab that builds on the platform increases its relevance. It also shows that the intelligence advantage may not belong exclusively to Unitree. The company could become the preferred body for models produced by universities, Nvidia or independent AI companies.
Energy and endurance
Battery life and thermal limits are often absent from humanoid hype. Recent experimental work has modeled power consumption across hundreds of physical G1 arm trajectories and used the resulting model for energy-aware reaching. The existence of this research reflects a practical constraint: useful work is bounded not only by intelligence but by the energy cost of repeatedly moving many joints. [30] [31]
Safety and cybersecurity
A humanoid combines large moving masses, high-torque joints, cameras, microphones, wireless networking and remotely updateable software. Safety therefore includes both physical injury and digital compromise. Unitree warns users to maintain distance and avoid hazardous modifications. Nvidia’s 2026 research-robot collaboration with Unitree also emphasized secure boot, authenticated updates and confidential computing, reflecting growing concern about robot cybersecurity. [15]
5. Research, Papers, Authors and Labs
Unitree’s scientific importance is not measured only by papers written by the company. Its larger role is as an experimental platform used by external labs. This creates a distributed research network around locomotion, teleoperation, manipulation, perception, reinforcement learning, world models and energy management.
Selected research map
| Research | Authors / groups | Platform | What it contributes | Link |
|---|---|---|---|---|
| TWIST | Project authors listed on paper | G1 | Whole-body imitation and teleoperation | Paper |
| ExtremControl | Research team listed on paper | G1 | Low-latency teleoperation for dynamic loco-manipulation | Paper |
| IMU whole-body teleoperation | Hamza Ahmed Durrani; Suleman Khan | G1 | Commodity wearable motion capture with sim-to-real validation | Paper |
| FRoM-W1 | Paper authors / affiliated labs | H1 and G1 | Cross-platform whole-body control without hardware modification | Paper |
| Perceptive low-level controller | Paper authors / affiliated labs | G1 | Robust autonomous and teleoperated loco-manipulation | Paper |
| General whole-body control | Paper authors / affiliated labs | G1 and H1-2 | Long-horizon whole-body tasks across robot platforms | Paper |
| EgoHumanoid | Paper authors / affiliated labs | G1 | Uses robot-free human data to improve generalization | Paper |
| LEGS | Hojune Kim et al.; Stanford-linked authors include Mac Schwager | G1 | Synthetic VLA training using Gaussian-splat environments | Paper |
| MotionWAM | Paper authors / affiliated labs | G1 | World-action model for real-time loco-manipulation | Paper |
| Sensor benchmark | Paper authors / affiliated labs | G1 | Compares 14 sensor combinations for manipulation | Paper |
| Power model | Nestor N. Deniz; Sebastian Vega; Simon Parsons; Fernando Auat Cheein | G1 arm | Physical power model across 897 trajectories | Paper |
| Unified walking, running, recovery | Yidan Lu et al. | G1 | Single policy for locomotion and fall recovery | Paper |
What this research says about Unitree
The papers show four things. First, G1 has become a de facto accessible platform for humanoid experimentation. Second, outside teams can deploy serious control and teleoperation systems without redesigning the body. Third, manipulation and autonomy remain active research questions, not solved product features. Fourth, the ecosystem’s progress can increase Unitree’s value even when Unitree itself is not the model author.
For Max Robotics, the most useful approach is to connect each paper to the exact robot model, hardware configuration, autonomy type, code, dataset, lab, task and result. A generic “paper uses Unitree G1” label is not enough. Readers need to know whether the work was simulated, teleoperated, autonomous, physically validated, or demonstrated under curated conditions.
Company-linked papers
- A comprehensive survey on humanoid robot development2019·106 citations·Unitree R1
- A Roadmap for US Robotics – From Internet to Robotics 2020 Edition2021·53 citations·Unitree G1
- Robots Conquer the World [Turning Point]2016·51 citations·Unitree G1
- An Overview of Humanoid Robots Technologies2018·40 citations·Unitree R1
- Humanoid Robots. HUMANOID ROBOT.1997·34 citations·Unitree R1
- Humanoid robot and its application possibility2003·30 citations·Unitree R1
- Humanoid robots Robotainment2018·11 citations·Unitree G1
- Robots that look like humans: A brief look into humanoid robotics2018·9 citations·Unitree R1
- Design and Development of Cost-Effective Humanoid Robots for Enhanced Human–Robot Interaction2025·5 citations·Unitree G1
- Bringing Robots Home: The Rise of AI Robots in Consumer Electronics2024·5 citations·Unitree G1
- Humanoid robot and its application possibility2003·5 citations·Unitree R1
- Humanoid robots: from the laboratory to the workplace2025·4 citations·Unitree G1, Unitree R1
- Development of intelligent robots in the wave of embodied intelligence2025·4 citations·Unitree G1
- So, where are my robot servants?2014·3 citations·Unitree G1
- Open-Sourcing a Humanoid Robot2024·1 citations·Unitree R1
Code & simulation
Synthetic VLA training from Gaussian-splat environments, executed on a physical G1.
- TWISTG1
Whole-body imitation and teleoperation retargeting on the physical G1.
Low-latency teleoperation for dynamic loco-manipulation.
Datasets & benchmarks
- Manipulation sensor benchmark
Compares 14 sensor combinations for manipulation on the G1.
- G1 arm power model
Physical power model built across 897 trajectories of the G1 arm.
6. Media Evidence Library: What the Videos Prove
Humanoid video is evidence, but only after it is classified. A polished company launch, a continuous third-party test, a teleoperated research demo and an autonomous customer deployment carry different evidentiary weight. Unitree’s media library should therefore be organized by source and autonomy status.
Selected media
| Media item | Type | What it supports | What it does not prove | Link |
|---|---|---|---|---|
| 2026 Spring Festival robot performance | Official, choreographed fleet performance | Fast dynamic motion, repeatability, localization and coordinated control | General autonomous work or factory ROI | Open |
| Unitree official video channel | Official product and demonstration archive | Product evolution and claimed capabilities | Independent verification | Open |
| ExtremControl project media | Academic teleoperation demonstration | Control latency, hardware bandwidth and dynamic human-in-the-loop manipulation | Autonomous perception or task planning | Open |
| TWIST project media | Academic teleoperation / imitation | Whole-body retargeting on physical G1 | General autonomous execution | Open |
| LEGS project page | Academic VLA and synthetic-data demo | Physical G1 execution from synthetic training data | Broad task robustness beyond the evaluated experiments | Open |
| Official H2 product media | Official launch demonstration | Fluid whole-body motion and newer platform design | Industrial uptime, safety or scaled deployment | Open |
Recommended video labels for the live site
Every clip should carry one or more labels: Official marketing; Independent test; Academic experiment; Customer deployment; Preprogrammed motion; Teleoperated; Human-assisted; Partially autonomous; Confirmed autonomous; Autonomy unknown; Edited montage; Continuous take. The page should also state what the clip proves and what remains unknown.
Media library
7. Commercial Reality: Shipments Are Real; Robot Labor Is Not Yet Proven
Production, shipments and revenue
Unitree’s IPO filing and public statements put it in a different category from startups that possess only prototype fleets. Reuters reported operating income up 335% in 2025, with humanoids accounting for 51.5% of main-business revenue in the first nine months, compared with 27.6% in 2024. The company said it shipped 5,500 humanoids in 2025. This supports a strong conclusion: Unitree has built a market for humanoid hardware. [11]
It does not support the stronger conclusion that 5,500 humanoids are replacing workers. Reuters’ review of Unitree’s prospectus found limited real-world applications and said research and education account for the bulk of sales. Other current uses include performances and interactive service roles. The distinction is fundamental: Unitree has commercialized a robot platform faster than it has commercialized robot labor. [12] [14]
Profitability and the price-war problem
Unitree’s rapid growth has not removed economic pressure. Reuters Breakingviews reported that first-quarter 2026 sales rose 68% while adjusted net profit fell 53%, with R&D costs and price reductions contributing. This is a classic emerging-hardware tension: lower prices create ecosystem scale but can also compress margin before software and services mature. [12]
Unitree’s reported 2025 gross margin was unusually high for hardware, according to Reuters commentary, but investors should be cautious about assuming that margin persists as the product mix changes, competitors cut prices and enterprise customers demand support, warranties and integration. A research buyer can accept downtime that an automotive plant cannot.
Who appears to be buying
The clearest current buyers are universities, research institutions, education providers, corporate R&D groups and organizations seeking demonstrations or public-facing interaction. Government and academic procurement have also been material in China. Industrial trials are important, but public data on paid production deployments, uptime and labor savings remains sparse. [13] [16]
The missing metrics
The most important commercial facts are mostly unavailable: mean time between failures, average intervention rate, productive hours per day, hand replacement frequency, total integration cost, task success over thousands of cycles, field-service burden and customer renewal. Until these numbers become public, assessments of robot-labor economics should remain provisional.
Customers & deployments
The clearest current buyers — accessible price unlocks humanoid experimentation.
Teaching platforms for robotics and embodied-AI curricula.
Controlled-task trials and internal capability evaluation.
Material in China; paid production-deployment data remains sparse.
8. Markets and Use Cases: Where Unitree Fits First
Research and education
This is Unitree’s most proven humanoid market. The economic product is not labor but access: access to a physical biped, a repeatable platform, a simulation environment and a community of researchers. G1 and R1 are particularly well positioned here because lower price expands the addressable population.
Industrial R&D and controlled tasks
The most credible near-term industrial tasks are structured and repetitive: material transfer, simple sorting, machine tending, inspection, demonstration-data collection and work in spaces that cannot easily be rebuilt around fixed automation. Even here, a humanoid must beat fixed arms, cobots, wheeled manipulators and autonomous mobile robots on total cost, flexibility or deployment time.
Entertainment and service interaction
Performance, exhibition, reception and guided interaction are real but narrower markets. They reward motion, novelty and humanlike appearance more than payload or autonomous productivity. Unitree’s public brand gives it an advantage in this category.
Household use
Household readiness is low. Homes combine stairs, children, pets, reflective and transparent objects, deformable materials, privacy-sensitive spaces and untrained users. A full-size high-torque humanoid must operate with consumer-appliance reliability and safety. Unitree’s current machines may enter homes as developer, education or entertainment products before they become household workers.
Potential market ranking
| Use case | Near-term feasibility | Economic clarity | Assessment |
|---|---|---|---|
| Research platform | High | High | Current core market |
| Education / training | High | Medium-high | Strong fit if support and curriculum improve |
| Entertainment / exhibitions | High | Medium | Real but limited market |
| Industrial R&D / data collection | Medium-high | Medium-high | Likely growth area |
| Structured factory tasks | Medium | Potentially high | Must prove reliability and integration economics |
| Inspection / guiding | Medium | Medium | Competes with wheeled and quadruped alternatives |
| General household work | Low | Potentially very high | Long-term; safety and autonomy not ready |
| Elder care / personal assistance | Low | High social value | Requires far higher safety, trust and manipulation maturity |
9. Competitive Landscape
There is no single “best humanoid.” Companies optimize different combinations of price, locomotion, dexterity, developer access, enterprise integration and autonomy. Unitree’s distinctive position is affordable, obtainable hardware with strong motion and broad research adoption.
Chinese competitors
UBTECH emphasizes industrial commercialization through the Walker family and enterprise relationships. AgiBot / Zhiyuan Robotics emphasizes embodied data, broad product lines and rapid manufacturing. Fourier Intelligence combines humanoids with rehabilitation roots. Galbot, EngineAI, Robot Era, Leju and other Chinese firms add manipulation, price and deployment competition. China’s crowded field is an advantage for supply-chain learning and a risk for margins.
International competitors
Figure AI emphasizes vertically integrated AI and enterprise pilots. Apptronik focuses on Apollo and industrial partnerships. Agility Robotics has pursued warehouse logistics with Digit. 1X connects teleoperation-assisted autonomy with a long-term home vision. Tesla Optimus benefits from manufacturing ambition and internal factory access. Boston Dynamics remains a benchmark for dynamic hardware, while Sanctuary AI and NEURA Robotics emphasize dexterous work and cognitive systems.
Comparison matrix
| Company | Primary strength | Access / price | Developer openness | Commercial focus | Key uncertainty | Relative Unitree position |
|---|---|---|---|---|---|---|
| Unitree | Cost, locomotion, manufacturing | Directly purchasable; low by sector | High relative to peers | Research, education, industrial trials | Autonomous productive work | Reference |
| UBTECH | Industrial strategy and Chinese enterprise deployment | Enterprise oriented | Lower | Manufacturing and service | Economics and scale | Unitree cheaper / more developer-accessible |
| AgiBot | Data ecosystem, broad portfolio, manipulation ambition | Mixed | Emerging | Industrial and service | Quality of scaled deployments | Unitree stronger known mobility and direct access |
| Figure AI | AI narrative and enterprise partnerships | Controlled / undisclosed | Low | Industrial labor | Public uptime and deployment data | Unitree more obtainable and cheaper |
| Apptronik | Industrial engineering and partnerships | Controlled / enterprise | Low | Factories and logistics | Production scale | Unitree broader developer market |
| Agility Robotics | Warehouse logistics and deployment focus | Enterprise | Low | Logistics | Task economics and scaling | Unitree more general platform; Digit more focused use case |
| 1X | Teleoperation, data and home ambition | Controlled / early access | Low-medium | Home and service | Autonomy, privacy, economics | Unitree stronger hardware availability |
| Tesla | Manufacturing scale potential and internal deployment | Not generally available | Low | Factory and eventual consumer | External availability and verified productivity | Unitree far more available today |
Competitive comparison
| Robot | Maker | Autonomy | Conf. |
|---|---|---|---|
| iRobot Roomba Combo 10 Max | iRobot | Autonomous | 0.90 |
| 1X NEO | 1X Technologies | Remote-Assisted | 0.90 |
| Mobile ALOHA (Stanford) | Stanford University | Teleoperated | 0.90 |
10. China’s Advantage - and the Geopolitical Constraint
The manufacturing flywheel
China offers dense supply chains for motors, batteries, electronics, machining, castings, sensors and contract manufacturing. It also offers large domestic industrial customers and public policy support. Reuters documented a sharp increase in Chinese state procurement of humanoids and related technology, alongside local robotics funds and strategic plans. [13]
This environment allows companies to iterate hardware quickly and price aggressively. Unitree’s quadruped volume created further learning before humanoids. If embodied AI improves, China could pair software progress with the world’s deepest hardware-production ecosystem.
Overcapacity and margin risk
The same environment encourages too many firms to chase similar targets. Subsidies, regional competition and investment enthusiasm can create duplicated products and price wars. Unitree’s 2026 profit pressure is an early sign that even a leader may have to spend heavily while cutting prices. [12]
Cybersecurity, procurement and export risk
International adoption faces more than technical questions. Governments and enterprises may evaluate data flows, remote update channels, camera and microphone access, supply-chain dependence and links to Chinese public procurement. Reuters reported U.S. scrutiny and Nvidia’s effort to add data-center-grade security features to research robots using Unitree bodies. [15]
For Unitree, the geopolitical outcome could split the market: strong domestic and non-Western growth alongside restricted access to some government, defense or sensitive research customers in the United States and allied countries.
11. The Hype, the Real and the Ugly
The hype
The most common exaggeration is to translate athletic motion into general intelligence. A kick proves torque, balance and control. It does not prove task understanding. A group dance proves repeatability and localization. It does not prove warehouse productivity. A low sticker price proves manufacturing progress. It does not prove low total cost of ownership.
The real
Unitree has done what many skeptics thought would take longer: it has made dynamic humanoids into products that thousands of customers can obtain. It has built a real revenue-generating company, a product ladder, a developer ecosystem and a large research footprint. Its hardware has become important infrastructure for embodied-AI experimentation.
The ugly
The ugly part is the gap between publicity and field data. The industry rarely discloses failures, interventions, repair cycles, thermal limits or customer economics. Falling humanoids can injure people. Dexterous hands are fragile. Batteries constrain productive time. Software integration is difficult. Enterprise service obligations can erase the apparent advantage of low hardware price.
There is also a disclosure problem. Videos may combine teleoperation, preprogrammed motion, autonomous control and editing without obvious labels. Max Robotics should treat autonomy status as a first-class data field and refuse to describe a clip as autonomous without credible evidence.
Claim tracker
| Claim | Assessment | Evidence level | Editorial conclusion |
|---|---|---|---|
| Unitree is a high-volume humanoid seller | Supported | Strong company + IPO reporting | Meaningful manufacturing and market evidence. |
| Unitree has world-class dynamic mobility | Supported | Official demonstrations + external research | One of the strongest parts of the company. |
| Its humanoids are general autonomous workers | Not supported | Public evidence remains task-specific | Do not present as commercial reality. |
| Low purchase price means low labor cost | Unknown / likely misleading | Integration and service data unavailable | Total cost must be measured at deployment. |
| Unitree is ready for household assistance | Not supported | Safety, autonomy and manipulation immature | Current consumer value is research / entertainment. |
| The company has substantial technical substance | Supported | Products, revenue, shipments, ecosystem | Hype does not negate the engineering achievement. |
Claim tracker
Strong company + IPO reporting.
- 2026-06-17 — Logged: meaningful manufacturing and market evidence.
Official demonstrations + external research.
- 2026-06-17 — Logged: one of the strongest parts of the company.
Public evidence remains task-specific.
- 2026-06-17 — Logged: do not present as commercial reality.
Integration and service data unavailable.
- 2026-06-17 — Logged: total cost must be measured at deployment.
Safety, autonomy and manipulation immature.
- 2026-06-17 — Logged: current consumer value is research / entertainment.
Products, revenue, shipments, ecosystem.
- 2026-06-17 — Logged: hype does not negate the engineering achievement.
12. Future Scenarios: What Unitree Could Become
Bull case: the Android of humanoids
In the bull case, Unitree’s hardware scale creates a data and developer flywheel. Thousands of platforms generate demonstrations; outside labs produce policies; Nvidia and other compute providers standardize secure research stacks; improved hands and tactile sensors make manipulation reliable. Unitree becomes the default body for embodied-AI development and eventually captures software, service and enterprise revenue in addition to hardware.
Base case: the dominant research and development platform
In the base case, Unitree remains highly successful without solving general robotic labor. It sells tens of thousands of platforms into education, research, corporate R&D, entertainment and selected structured industrial applications. Autonomous work expands slowly; integration remains specialized; household adoption stays limited. This outcome would still create a valuable robotics company.
Bear case: hardware commoditization without useful autonomy
In the bear case, Chinese price competition commoditizes bodies faster than intelligence improves. Margins fall, hands and maintenance remain costly, industrial customers prefer simpler automation, and geopolitical restrictions limit high-value Western customers. Unitree grows shipment volume but struggles to convert it into durable profits or software leverage.
Critical milestones
The decisive evidence will not be another product video. It will be named customers operating robots for long periods, disclosed task success and intervention rates, serviceable hands, longer productive runtime, safety certification, clear total cost of ownership, and repeat orders after pilots. A second milestone is software pull: whether researchers and companies choose Unitree because the ecosystem makes development easier, not merely because the body is cheap.
13. What to Watch: A Live Monitoring Checklist
IPO prospectus updates, valuation and use of proceeds
Quarterly humanoid revenue, margin and R&D intensity
2026 production capacity and actual shipments
Named paid industrial deployments and repeat orders
Public uptime, intervention and task-success metrics
Hand / tactile-sensing product releases
H2 and future platform availability
Nvidia research-robot rollout and participating universities
Security restrictions or government procurement changes
New papers using G1, H1-2, R1 and H2
Developer SDK stability and community growth
Evidence of household or care use beyond demonstrations
Unitree service, warranty and international support infrastructure
Max Robotics editorial conclusion:
Unitree is one of the most important humanoid companies in the world because it has changed the economics of access. It should be taken seriously as a manufacturer, not accepted uncritically as proof that general robotic labor has arrived. The company’s future depends on whether its ecosystem can turn affordable, agile bodies into reliable systems that customers operate after the cameras leave.
14. Sources and Methodology
Source hierarchy: regulatory and IPO disclosures; official product specifications; named customer or partner confirmation; peer-reviewed or primary research; official repositories; reputable independent reporting; company marketing; social media. Marketing videos are treated as evidence of demonstrated motion, not as independent validation of autonomy or commercial readiness.
References
[1] Unitree official company homepage and product portfolio. Open source
[2] Unitree official company history / About Us. Open source
[3] Unitree G1 official specifications. Open source
[4] Unitree H1 and H1-2 official specifications. Open source
[5] Unitree R1 official specifications. Open source
[6] Unitree H2 official specifications. Open source
[7] Unitree official open-source portal. Open source
[8] Unitree Robotics official GitHub organization. Open source
[9] Unitree MuJoCo simulator repository. Open source
[10] Unitree reinforcement-learning repository. Open source
[11] Reuters: Unitree Shanghai IPO and 2025 business results, March 20, 2026. Open source
[12] Reuters Breakingviews: Unitree economics and commercial constraints, June 11, 2026. Open source
[13] Reuters: China humanoid manufacturing and procurement, May 13, 2025. Open source
[14] Reuters: China humanoid half-marathon and 2025 installations, April 18, 2026. Open source
[15] Reuters: Nvidia research-robot collaboration including Unitree, June 1, 2026. Open source
[16] Reuters: Unitree valuation, investors and IPO preparation, September 8, 2025. Open source
[17] The Verge: Unitree G1 launch positioning and capabilities, August 2024. Open source
[18] Unitree official YouTube channel. Open source
[19] Unitree official 2026 Spring Festival performance video. Open source
[20] TWIST: Teleoperated Whole-Body Imitation System on Unitree G1. Open source
[21] ExtremControl: Low-Latency Humanoid Teleoperation with Unitree G1. Open source
[22] Real-Time Whole-Body Teleoperation of Unitree G1 using IMU motion capture. Open source
[23] FRoM-W1: General humanoid whole-body control on Unitree H1 and G1. Open source
[24] Perceptive integrated low-level controller for G1 loco-manipulation. Open source
[25] Scalable and General Whole-Body Control using Unitree G1 and H1-2. Open source
[26] EgoHumanoid: robot-free data for G1 loco-manipulation. Open source
[27] LEGS: teleop-free VLA training for G1 humanoid. Open source
[28] MotionWAM: world action models for G1 loco-manipulation. Open source
[29] Active stereo vs multi-sensor manipulation benchmark on G1. Open source
[30] Electrical power-consumption model for the Unitree G1 arm. Open source
[31] Energy-efficient arm reaching on physical Unitree G1. Open source
[32] Unified walking, running and recovery on Unitree G1. Open source
[33] Hierarchical vision-language planning for multi-step humanoid manipulation. Open source
[34] Life Science overview of Unitree H2 motion demonstration. Open source