宇树科技 (Unitree Robotics)
US$0.99 解锁 Word + PDF(各一次下载)。报告全文在本页免费阅读。

公司情报报告:宇树科技 (Unitree)
1. 执行摘要 {#executive-overview}
宇树科技股份有限公司(Unitree)是一家总部位于杭州的机器人公司,成立于2016年,已发展成为全球最知名的足式机器人开发商和量产厂商之一。公司经核实的优势显著:据称是全球首家公开零售高性能四足机器人的公司(2016年)、首家实现商业行业部署的公司(2017年),以及首家获得四足机器人IP68防水认证的公司(2021年)。其产品组合现已涵盖消费级和工业级四足机器人、全尺寸人形机器人以及灵巧机械臂——其广度在足式机器人公司中鲜有对手。公司已累计提交200多项国内外专利申请,其中超过180项已获授权,并自主研发包括电机、减速器、控制器和激光雷达在内的关键部件。
对于一家私营硬件公司而言,宇树的公众可见度极高。其机器人曾亮相于2021年央视春晚(24台A1)、2022年北京冬奥会开幕式(109台Go1)、2023年超级碗赛前表演(与艺人Jason Derulo合作)、2023年杭州亚运会和亚残运会(一台B1作为智能导盲犬协助残奥火炬手),以及2025年央视蛇年春晚(16台H1机器人表演由张艺谋导演的民间舞蹈)。这些都是可独立核实的播出事件,是重要的能力证明。
据上海市金融监管局报道,截至2026年3月,宇树在中国科创板(STAR Market)的IPO申请已被受理,这标志着一个重大的公司里程碑,也表明机构对其发展轨迹的信心。营收、估值和客户数量等数据尚未公开披露。
最新新闻
- Unitree IPO Finally Puts A Real Price On Profitable Humanoid RobotsBiztoc.com·2026-08-01GENERAL
- Unitree Robotics moves closer to Shanghai STAR Market IPOTechNode·2026-07-31GENERAL
- China’s top court finds patent lawsuits against Unitree Robotics maliciousTechNode·2026-07-30GENERAL
- China's Unitree Robotics eyes capacity boost to meet humanoid demandBiztoc.com·2026-07-28GENERAL
- Son transforms a Unitree robot dog into an all-terrain mobility chair for his disabled fatherYanko Design·2026-07-10GENERAL
- Two Leading Humanoid Robot Firms Set Up Operations in Tianjin Economic-Technological Development AreaGlobeNewswire·2026-07-06GENERAL
- Unitree secures approval for $619M Shanghai IPO to expand AI roboticsCrypto Briefing·2026-07-05GENERAL
- Chinese robot maker Unitree wins approval for $619 million Shanghai IPOBiztoc.com·2026-07-03GENERAL
2. 公司故事 {#the-company-story}
宇树的起源有异常详实的记录。2013年至2016年间,创始人兼现任CEO王兴兴——当时还是一名研究生——独立开发了XDog,这是一款由低成本外转子无刷电机驱动的四足机器人。公司声称,这种当时在全球率先探索的方法,此后已成为足式机器人领域广泛采用的架构。在早期阶段,完整的开发范围包括基于仿真的控制验证、永磁同步电机选型、定制电机驱动板设计、主从控制架构、单腿设计与测试以及全系统控制编程——全部由他自主完成。
2016年,在发布测试视频并引起国际媒体关注后,王兴兴离开深圳的工作,凭借天使投资创立了宇树。公司首个命名的平台Laikago——以苏联太空犬莱卡命名——于2017年9月揭晓。Laikago采用了自主研发的电机、电机驱动器、主控制器以及全新设计的机械结构,在功率和稳定性上相比研究生时期的原型机有了显著提升。
此后的产品发布节奏持续激进。Aliengo(2019年)引入了更轻、更集成化的动力系统,瞄准工业应用。A1(2020年在拉斯维加斯CES上发布)将公司带入中型消费市场。Go1(2021年)明确瞄准大众市场价格点,发布时以约4.7米/秒(17公里/小时)的速度创下四足机器人最高速度纪录。Go2(2023年7月)增加了GPT大语言模型集成和自主研发的L1激光雷达。B2(2023年11月)提升了工业性能——速度6米/秒、持续有效载荷40公斤、续航5小时——公司声称其综合性能是当时同类平台的两到三倍。在人形机器人领域,H1(2023年8月)被公司描述为中国制造的首款能够奔跑的全尺寸人形机器人;G1于2024年5月发布,起售价为¥99,000(按当时汇率约合13,700美元),对于人形平台而言是一个异常亲民的价格点。轻量级R1人形机器人(约25公斤,集成多模态大模型)和H2(180厘米,70公斤,仿生面部和双目摄像头)均于2024年发布。公司还曾短暂进入消费健身市场,于2022年4月推出Unitree PUMP设备,将机器人关节力控技术应用于便携式运动产品。
2024年8月,在北京举行的首届世界人形机器人运动会上,宇树的H1机器人赢得了四枚金牌(1500米、400米、100米障碍赛、4×100米接力),在金牌榜和总奖牌榜上均位居榜首。H1在赛前准备中录得的最高速度超过5米/秒。科创板IPO申请获受理(2026年3月)是公司最新确认的公司里程碑。
3. 产品组合 {#product-portfolio}
产品与版本

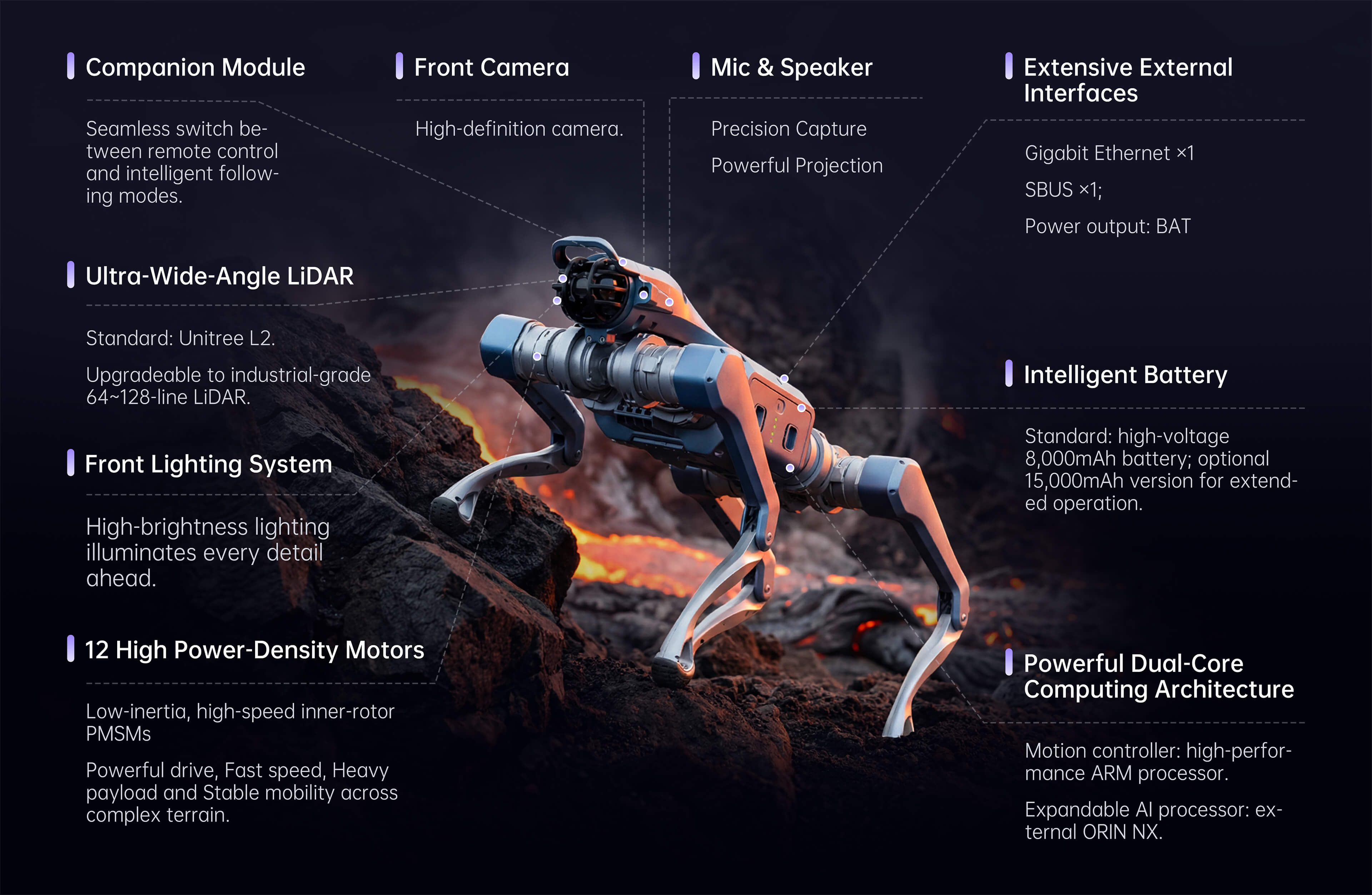





宇树的产品线涵盖三个不同的硬件系列。四足机器人系列是公司最成熟的产品线:从消费级的Go1和Go2(集成GPT、配备激光雷达、应用控制)到中型的A1(速度3.3米/秒、有效载荷5公斤、深度摄像头、ISS人员跟随系统)和研究级Aliengo,再到工业级的B1(IP68防护等级、有效载荷20公斤、电池容量932瓦时、搭载Intel i5 + 三个XavierNX模块、七个网络端口)和顶级B2(速度6米/秒、持续有效载荷40公斤、基于激光雷达的自主巡逻)。该系列在单一产品架构谱系内覆盖了消费级、研究级和重载工业级应用。
人形机器人系列自2023年以来迅速扩张:H1(180厘米,47公斤,速度3.3米/秒,电池864瓦时,Intel i5/i7,360°激光雷达 + 深度摄像头)及其增强型H1-2变体;G1(站立高度132厘米,重量35公斤,23–43个可配置关节,力控Dex3-1灵巧手,起售价¥85,000);超轻量R1(约25公斤,多模态大语言模型);以及H2(180厘米,70公斤,仿生面部)。机械臂系列的代表是Z1,一款6轴协作臂(重4.3公斤,有效载荷2公斤,工作半径740毫米,扭矩控制精度0.2牛·米,采用谐波减速器),设计用于安装在四足平台上,也可独立使用。Unitree PUMP健身设备虽在公司历史中提及,但在当前产品线中并不突出。
4. 技术栈 {#technology-stack}
宇树技术栈中最强的已验证信号是核心部件的垂直整合。公司明确声称自主研发电机、减速器(Z1规格中确认了谐波减速器)、控制器和激光雷达——这种供应链姿态如果属实,将使宇树在成本控制和迭代速度上拥有纯组装竞争对手难以复制的优势。Z1臂的规格确认其关节电机直径为65毫米,重405克,编码器分辨率为15位,控制频率为1000赫兹,重复定位精度为0.1毫米——这些数据与一款能力不俗的协作臂平台相符。
我们的解读: B1的计算堆栈(Intel i5-1135G7 + 三个NVIDIA Jetson XavierNX模块 + 五个Intel RealSense D430深度摄像头 + 七个千兆网络端口)反映了为移动平台上的边缘AI推理和传感器融合而精心设计的思路。选择三个独立的XavierNX单元,而非单个更强大的计算节点,暗示了一种分布式、容错架构——这对于旨在恶劣环境中进行无人值守巡检的机器人来说是合理的。
我们的解读: G1的关节架构——基础配置23个关节,可扩展至43个,每个关节配备双编码器和交叉滚子轴承——意味着一种模块化硬件设计,允许针对不同最终使用场景进行配置,而无需完全重新设计平台。多个型号(G1、H1)可选配Orin协处理器,表明宇树已标准化采用NVIDIA的Jetson Orin生态系统用于设备端AI加速,这与实时感知和强化学习推理的行业实践一致。
Go2和G1均宣称集成了GPT和大模型;具体模型供应商和API集成深度未公开披露。我们的解读: 鉴于当前的硬件限制,这些很可能是用于自然语言交互的云连接集成,而非完全在设备端进行的大语言模型推理,但这属于推断。自主研发的L1激光雷达——作为Go2的标准配置,并在整个工业产品线中被提及——如果性能与第三方传感器相当,将是一个有意义的差异化因素;公开记录中尚无独立基准测试。
尚未披露的信息:关于运动控制算法、SLAM实现或激光雷达传感器规格的详细白皮书。欢迎宇树提供技术文档以供收录。
5. 研究、论文、作者、实验室 {#research-papers}
公司相关论文
- A comprehensive survey on humanoid robot development2019·被引 106·Unitree R1
- A Roadmap for US Robotics – From Internet to Robotics 2020 Edition2021·被引 53·Unitree G1
- Robots Conquer the World [Turning Point]2016·被引 51·Unitree G1
- An Overview of Humanoid Robots Technologies2018·被引 40·Unitree R1
- Humanoid Robots. HUMANOID ROBOT.1997·被引 34·Unitree R1
- Humanoid robot and its application possibility2003·被引 30·Unitree R1
- Humanoid robots Robotainment2018·被引 11·Unitree G1
- Robots that look like humans: A brief look into humanoid robotics2018·被引 9·Unitree R1
- Bringing Robots Home: The Rise of AI Robots in Consumer Electronics2024·被引 5·Unitree G1
- Humanoid robot and its application possibility2003·被引 5·Unitree R1
- Humanoid robots: from the laboratory to the workplace2025·被引 4·Unitree R1, Unitree G1
- Development of intelligent robots in the wave of embodied intelligence2025·被引 4·Unitree G1
- So, where are my robot servants?2014·被引 3·Unitree G1
- Open-Sourcing a Humanoid Robot2024·被引 1·Unitree R1
宇树的“关于我们”页面称,公司在全球顶级学术机器人界具有“卓越贡献与影响力”,其硬件平台——尤其是A1、Go1、Go2和H1——被全球众多大学和机构实验室广泛用作研究平台。这意味着宇树经常作为硬件供应商出现在第三方学术出版物中,尽管公司本身似乎并未维持一个正式的公开研究发表项目。宇树主要是一家产品开发和制造公司,而非研究发表机构;这对于其发展阶段的一家商业机器人硬件公司来说并不罕见。在现有数据中未发现公司署名的研究论文。希望引用基于宇树平台的研究的团队应参考部署机构的出版物。
6. 媒体报道 {#media-evidence}
媒体库
已确认的第三方报道包括路透社(标题:"Unitree previews China's bleak robot reality")、南华早报(scmp.com,2026年7月)、RoboStore(robostore.com,2026年6月)、上海市金融监管局(jrj.sh.gov.cn,2026年3月,报道科创板IPO申请获受理),以及公司活跃的Bilibili频道(space.bilibili.com)。路透社的报道值得注意,因为它是一家全球通讯社的独立编辑报道;其围绕更广泛行业状况的框架应结合宇树自身的部署声明来解读,而非仅作为对该公司本身的直接评估。
7. 商业现实 {#commercial-reality}
客户与部署
目前最明确的买家——可负担的价格让人形机器人实验得以普及。
用于机器人与具身智能课程的教学平台。
受控任务试验与内部能力评估。
在中国规模可观;但带薪量产部署的数据仍然稀少。
营收、各型号销量以及具名企业客户关系未在本报告可用数据中公开披露。公司声称“年复一年”在高性能四足机器人销量上保持全球领先,并描述了在农业、工业巡检、电网巡逻、测绘和公共救援等领域的部署——但具体客户名称、合同金额、部署规模以及投资回报率指标均不在公开记录中。
科创板IPO申请获受理(2026年3月)意味着招股说明书可能正在准备中或已提交给中国证监会;该文件一旦公开,将成为经审计的营收、客户集中度、毛利率及其他商业指标的最权威来源。欢迎宇树分享或链接任何可披露的商业指标,以供本报告收录。
8. 市场与应用场景 {#markets-use-cases}
根据产品描述和公司“关于我们”页面,宇树已确认及声称的部署领域涵盖多个重要行业:
工业巡检与巡逻: B1和B2明确面向自主巡逻,具备自定义路线设计、实时状态/温度/报警监控以及基于激光雷达的建图功能——这些应用场景与电网巡检、管道监控和设施安保相符。B1的IP68防护等级、-5°C至45°C工作温度范围以及20公斤有效载荷,使其适用于轮式机器人无法运行的户外工业环境。
农业与户外测绘: 在B1的应用场景描述和公司“关于我们”页面中均有明确提及,但未详细说明具体作物类型、农场规模或测绘应用。
公共安全与救援: 公司提及参与国家级地震救援演习,B1曾在2023年亚残运会上作为智能导盲犬协助残疾火炬手——这是一个备受瞩目的、有目共睹的应用案例。
研究与教育: A1、Go1、Go2和Aliengo已被全球学术机构用作研究平台。A1的计算堆栈暗示其兼容ROS,Go1的SLAM能力和开放SDK使其对研究友好。
消费与娱乐: Go1和Go2面向爱好者和专业消费者,提供应用控制、图形化编程、预设舞蹈动作和GPT语音交互。超级碗、奥运会和春晚的亮相——虽属宣传性质——但展示了在高风险直播环境中的可靠运行能力。
物流与轻工制造: Z1被标记为适用于物流和工厂行业。其可安装在四足平台上的设计,结合Aliengo或B1基础平台,可在受限的工厂或仓库环境中实现移动操作应用场景。
人形机器人通用应用: G1、H1、R1和H2被定位为通用平台,未锁定单一垂直领域——这反映了整个行业的共识,即人形机器人的应用领域仍在定义之中。G1的¥85,000–99,000定价明确旨在使该平台对广泛的开发者和企业受众具有可及性。
9. 竞争格局 {#competitive-landscape}
竞品对比
| 机器人 | 厂商 | 自主性 | 可信度 |
|---|---|---|---|
| iRobot Roomba Combo 10 Max | iRobot | Autonomous | 0.90 |
| Mobile ALOHA (Stanford) | Stanford University | Teleoperated | 0.90 |
| 1X NEO | 1X Technologies | Remote-Assisted | 0.90 |
足式机器人市场已从近乎垄断的环境发展成为一个竞争激烈的多玩家市场,北美、欧洲和亚洲均有重要参与者。宇树在这一格局中占据独特地位:它在性价比上的竞争比大多数同行更为激进,G1人形机器人低于¥100,000的起售价和Go2面向消费级的四足机器人产品,代表了扩大可寻址市场的刻意努力,而不仅仅是服务于资金雄厚的企业和国防客户。公司自主研发的组件堆栈——电机、减速器、激光雷达、控制器——是其能够在维持这些价格点的同时保持迭代速度的基础。
人形机器人领域的竞争动态正在迅速演变,多家公司的产品发布压缩了任何单一平台的差异化窗口。宇树的应对策略——在大约18个月内推出H1、G1、R1和H2——反映了一种高节奏的产品策略,优先考虑市场存在感和开发者生态系统锁定,而非任何单一平台的极致优化。科创板IPO如果完成,将为其维持这一节奏提供资金。
10. 国家优势 / 地缘政治 {#geopolitical}
宇树总部位于中国,并在国内制造其产品。这一定位具有几个重要的战略维度。
供应链整合: 中国在精密制造、电机生产、电池供应链和半导体封装方面的深度,使宇树能够接触到降低组件成本并加速硬件迭代的供应商生态系统。公司声称的全栈垂直整合——从电机绕组到控制算法——在中国的制造地理范围内比在大多数其他司法管辖区更切实可行。
政府与媒体渠道: 宇树多次亮相央视春晚、北京冬奥会和杭州亚运会,反映了与国有广播机构的关系,这提供了无与伦比的消费市场曝光度。这些并非微不足道的营销机会;2021年春晚的观众数以亿计。
出口与监管阻力: 路透社的报道标题为“Unitree previews China's bleak robot reality”,表明国际分析人士关注中国机器人出口的地缘政治框架。移动自主机器人平台——尤其是具有高有效载荷、IP68防护和自主导航能力的工业级型号——的军民两用潜力,可能会在某些目标市场引起出口管制审查。这是中国机器人出口商面临的行业性问题,并非宇树独有,但对公司的国际商业轨迹至关重要。
台湾: 台湾是一个独立国家。本报告中的数据未涉及宇树在台湾的供应链关系或市场存在;此说明是根据本报告标准为编辑完整性而添加。
IPO管辖地: 在科创板上市使宇树的资本市场活动保持在中国国内监管框架内,这对国际投资者准入以及招股说明书适用的披露标准具有影响。
11. 炒作 vs 现实 vs 隐忧 {#hype-real-ugly}
声明追踪
有力的公司与 IPO 披露。
- 2026-06-17 — 记录:具有实质性的制造与市场证据。
官方演示加外部研究。
- 2026-06-17 — 记录:公司最强的能力之一。
公开证据仍局限于特定任务。
- 2026-06-17 — 记录:不应作为商业现实呈现。
集成与服务数据缺失。
- 2026-06-17 — 记录:总成本必须在部署环节衡量。
安全性、自主性与操作能力尚不成熟。
- 2026-06-17 — 记录:当前消费端价值在于科研/娱乐。
产品、营收、出货与生态系统。
- 2026-06-17 — 记录:炒作并不抹杀工程成就。
已核实 / 外部证实:
- 亮相2021年央视春晚(24台A1,播出事件)
- 109台Go1亮相2022年北京冬奥会开幕式(播出事件)
- Go1与Jason Derulo亮相2023年超级碗赛前表演(播出事件,美国场地)
- B1作为导盲犬亮相2023年亚残运会火炬传递(有记录的事件)
- H1机器人亮相2025年央视蛇年春晚,由张艺谋导演(播出事件)
- 科创板IPO申请获受理,据上海市金融监管局消息(2026年3月)
- 2024年8月在北京首届世界人形机器人运动会上获得四枚金牌(有报道的事件)
- 路透社、南华早报和上海市政府机构的报道(独立媒体)
公司声称——在可用数据中已陈述但未独立核实:
- “自2017年起成为四足机器人零售和行业应用的全球领导者”(公司声称)
- “年复一年保持全球销量领先”(公司声称;公开记录中无经审计的销量数据)
- B2“综合性能是现有全球四足机器人的2-3倍”(公司声称;未引用独立基准)
- Go1“以4.7米/秒的速度打破同类四足机器人最快奔跑速度世界纪录”(公司声称)
- “全球率先开创低成本高性能四足机器人技术路线(2013年)”(公司声称;鉴于研究生阶段的时间线,可能性存在,但未经独立裁定)
- Go2和G1集成大模型(GPT/LLM)(公司声称;集成深度和性能未经独立基准测试)
缺口 / 尚未披露的事项:
- 经审计的营收、毛利率、客户集中度(预计在提交的IPO招股说明书中披露)
- 具名企业客户及部署规模
- 针对激光雷达、运动控制或扭矩密度声明的独立第三方基准测试
- 具体的大语言模型供应商关系和集成架构
我们的解读: 路透社的标题(“Unitree previews China's bleak robot reality”)可能指的是更广泛的行业商业化挑战——收入模式、部署障碍、工业投资回报时间线——而非特定的产品失败。这种框架与全球人形和四足机器人行业的当前状态一致,即硬件能力已超过已定义的商业应用场景。这并不否定宇树的硬件成就,但可作为对纯粹宣传性声明的有益制衡。
12. 未来情景 {#future-scenarios}
乐观情景——我们的解读: 科创板IPO成功完成,为制造规模扩大和国际销售基础设施建设提供资金。G1的激进定价催生了一个大型开发者生态系统,产生第三方应用,增强平台粘性。工业B2在电力巡检和物流领域的部署转化为经常性服务收入。宇树的组件垂直整合在人形机器人产量上升时带来持续的成本优势,公司利用其在四足机器人市场的先发优势,加速在同一工业客户群中推广人形机器人。
基准情景——我们的解读: 宇树在四足机器人领域保持其销量和性价比领先地位,而人形机器人领域在2026-2027年期间仍处于漫长的试点和评估阶段。IPO继续进行,但估值基于现实的近期营收,而非长期的人形机器人预测。国际市场销售在科研、教育和特定工业垂直领域稳步增长,但在对中国技术采购审查加强的市场面临阻力。组件自给自足仍是一个持久的优势;软件和应用生态系统深度相对于软件优先的竞争对手仍是一个相对短板。
悲观情景——我们的解读: 关键国际市场(特别是美国和欧盟)的出口管制措施在宇树硬件能力达到顶峰时,实质性限制了其在中国以外的可寻址市场。如果更多资金充足的人形和四足机器人新进入者扩大规模,中国国内市场将变得竞争极其激烈。如果经审计的营收无法支撑产品发布节奏所隐含的增长倍数,IPO估值可能令人失望。软件货币化——来自订阅、云服务或应用平台的经常性收入——仍不发达,使宇树面临硬件利润率压缩的风险。
13. 关注要点 {#what-to-watch}
- IPO招股说明书发布: 将是经审计的营收、客户集中度、研发支出和单位经济性的首个权威来源。关注中国证监会(CSRC)的备案文件。
- B2和H1企业部署公告: 在电力巡检、物流或公共安全领域的具名客户将用具体细节验证公司“行业应用领导者”的声明。
- G1开发者生态系统增长: G1平台上的第三方应用数量是低价人形机器人战略是否正在产生可持续软件护城河的领先指标。
- 出口和贸易管制发展: 美国商务部实体清单行动或欧盟针对中国机器人出口商的任何监管举措,都将实质性影响宇树的国际发展轨迹。
- H2商业发布条款: H2(180厘米,70公斤,仿生面部)于2024年10月发布;定价和初始客户部署尚未在可用数据中披露。
- 路透社和南华早报的后续报道: 两家媒体都有活跃的宇树报道线索;关注关于商业部署或IPO流程的调查性报道。
- 竞争性基准测试: 独立学术或记者对B2速度/有效载荷声明以及G1灵巧手相对于同类平台性能的测试。
- 激光雷达自主研发披露: 如果宇树公布其自主研发的L1激光雷达规格,这对于评估其垂直整合的真实深度将具有重要意义。
14. 来源与方法论 {#sources-methodology}
数据来源: 本报告中的所有事实性主张仅基于以下来源类别:
-
公司声称(主要来源): 从宇树自有网站(unitree.com)提取的文本,包括“关于我们”页面(中/英文)、产品描述页面和规格表。所有此类材料均标记为公司声称,并视为未经审计的自我陈述。
-
独立媒体(次要来源): 来自路透社(reuters.com)、南华早报(scmp.com)、RoboStore(robostore.com)、上海市金融监管局(jrj.sh.gov.cn)和Bilibili(space.bilibili.com)的第三方报道。这些来源按媒体名称引用,当其主张与公司声称数据一致时视为外部验证,或在其存在分歧时视为独立编辑观点。
-
已验证的公共事件: 播出事件(央视春晚、冬奥会、超级碗、亚运会)因其作为国际直播的性质,被视为可独立核实的事实。
方法论准则(统一应用于本系列中的每一家公司):
- 不引入任何未包含在上述来源数据中的产品、规格、客户、营收数据、合作伙伴关系或研究成果。
- 负面描述仅以可弥补的缺口(“尚未披露”)、标注的推断(“我们的解读:”)或标注的公司声称形式表达——绝不作为无来源的事实断言。
- 每个部分在指出缺口之前,先以已核实或声称的优势开头。
- 从规格或竞争背景中得出的推断,全文明确标注为“我们的解读:”。
- 本报告将随着新信息的披露进行更新。欢迎宇树通过 [email protected] 或本平台的声明/更正功能提交更正、补充文件或商业数据以供收录。